近日,我校信息工程學(xué)院博士生劉成林在導(dǎo)師徐志剛教授的指導(dǎo)下��,以第一作者身份在交通運(yùn)輸工程學(xué)科國(guó)際頂級(jí)期刊《Transportation Research Part C : Emerging Technologies》(TR-C)上發(fā)表論文“A multistep cooperative lane change strategy for connected and autonomous vehicle platoons departing from dedicated lanes”(自動(dòng)駕駛專用車道車輛隊(duì)列多步協(xié)同換道策略)�����。論文通信作者為信息工程學(xué)院徐志剛教授和劉志廣講師����,論文第一署名單位和通信作者單位均為長(zhǎng)安大學(xué)�����。
論文指出����,在自動(dòng)駕駛專用車道上�����,自動(dòng)駕駛車輛更容易組成車隊(duì)�����。然而����,當(dāng)車隊(duì)需要從專用車道換道至相鄰的普通車道并與人工駕駛車輛混行時(shí)�����,如何實(shí)現(xiàn)車隊(duì)快速換道并在換道后保持車隊(duì)隊(duì)形不變是一個(gè)挑戰(zhàn)�����。本文提出了一種考慮目標(biāo)車道人工駕駛車行為不確定性的自動(dòng)駕駛車隊(duì)強(qiáng)制換道策略;基于模型預(yù)測(cè)控制方法構(gòu)建了三種自動(dòng)駕駛車軌跡規(guī)劃模型�,以實(shí)現(xiàn)隊(duì)列分步協(xié)同換道,同時(shí)保證車隊(duì)在換道后的隊(duì)形不變���;并給出了隊(duì)列在各種場(chǎng)景下的換道關(guān)鍵位置���,以確保車隊(duì)的換道成功率。
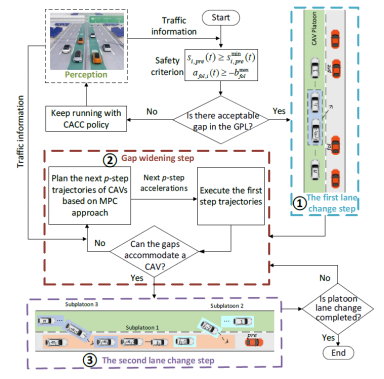
圖1 策略框架
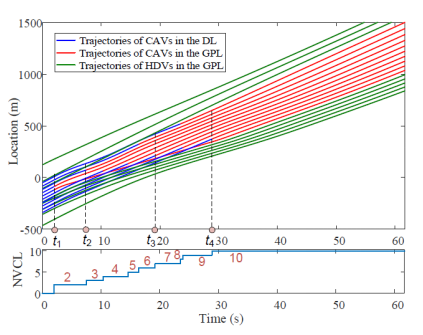
圖2 分步多車協(xié)同換道軌跡
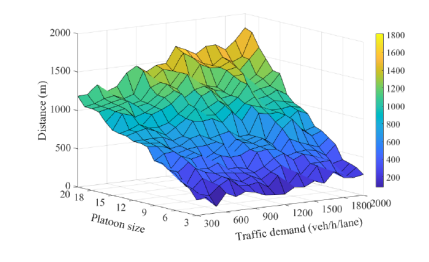
圖3 車隊(duì)換道關(guān)鍵位置
TR-C是全球交通運(yùn)輸學(xué)科領(lǐng)域的頂級(jí)期刊����,主要報(bào)道前沿新興技術(shù)在交通運(yùn)輸領(lǐng)域的最新應(yīng)用,該刊當(dāng)前影響因子為8.3�,在中科院和科睿唯安JCR分區(qū)中均屬于Q1類Top期刊。
(供圖:王威 審稿:楊玉龍 網(wǎng)絡(luò)編輯:和燕)






