2月26日���,我?���?蒲袌F(tuán)隊(duì)在交通運(yùn)輸科學(xué)領(lǐng)域頂級(jí)期刊《Transportation Research Part B: Methodological》上發(fā)表了題為《Compliance-constrained resilient system optimal trajectory planning for CAVs at on-ramp intersection with multiple lanes》的研究論文。信息工程學(xué)院慕晨副教授為第一作者���,長(zhǎng)安大學(xué)為第一作者單位����,實(shí)現(xiàn)了我校在該期刊上以第一作者單位發(fā)表論文的突破性進(jìn)展。
本研究聚焦于高速公路和城市快速干道的關(guān)鍵交通瓶頸——匝道入口區(qū)域��,針對(duì)該區(qū)域交通管控面臨的四大技術(shù)難題展開攻關(guān):智能網(wǎng)聯(lián)車輛的復(fù)雜微觀交互行為建模�、實(shí)時(shí)算法設(shè)計(jì)、個(gè)體車輛對(duì)系統(tǒng)最優(yōu)軌跡方案的服從性�����,以及擾動(dòng)條件下的軌跡修正�。研究團(tuán)隊(duì)創(chuàng)新性地提出了一套完整的系統(tǒng)最優(yōu)軌跡規(guī)劃方案(CR-SOTP),該方案采用事件驅(qū)動(dòng)的耦合滾動(dòng)時(shí)域框架���,構(gòu)建了雙層優(yōu)化模型���。研究團(tuán)隊(duì)設(shè)計(jì)了一套并行計(jì)算輔助的松弛-實(shí)施-迭代算法,實(shí)現(xiàn)了模型的高效實(shí)時(shí)求解����。實(shí)驗(yàn)結(jié)果表明����,CR-SOTP方案能夠生成高效且具備韌性的車輛軌跡����,在多車道匝道交叉口的交通安全性����、通行效率和可持續(xù)性等方面均取得了顯著提升。研究成果為智能網(wǎng)聯(lián)車輛在復(fù)雜交通環(huán)境下的軌跡規(guī)劃提供了創(chuàng)新性解決方案��。
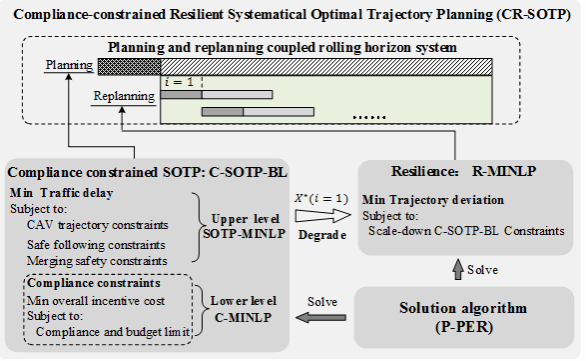
CR-SOTP研究框架
論文首頁(yè)
《Transportation Research Part B: Methodological》是全球交通運(yùn)輸科學(xué)領(lǐng)域最具影響力的國(guó)際期刊����,該期刊發(fā)表的研究成果注重系統(tǒng)性和完整性,深入挖掘交通現(xiàn)象背后的本質(zhì)規(guī)律�����,能夠全面地解決交通運(yùn)輸領(lǐng)域的實(shí)際問題���。該研究成果是信息工程學(xué)院在交通信息工程及控制�、計(jì)算機(jī)應(yīng)用技術(shù)領(lǐng)域取得的新突破���,是長(zhǎng)期秉承科研創(chuàng)新的重要成果��,充分體現(xiàn)了學(xué)院科研水平和人才隊(duì)伍建設(shè)的質(zhì)量�,為學(xué)校交通運(yùn)輸工程學(xué)科“雙一流”建設(shè)做出了實(shí)質(zhì)性貢獻(xiàn)。
論文信息:Chen Mu, Lili Du*, Yisheng An, Xiangmo Zhao. Compliance-constrained Resilient System Optimal Trajectory Planning for CAVs at On-ramp Intersection with Multiple Lanes. Transp. Res. Part B, 2025, vol 194, 103173.
論文鏈接:https://www.sciencedirect.com/science/article/pii/S0191261525000220
(供圖:慕晨 審稿:安毅生 網(wǎng)絡(luò)編輯:和燕)






